团队简介
yl7703永利官网机电装备智能控制研究团队,专注于机器人与机电装备智能控制领域问题,主要研究方向为机器视觉检测、机器人智能控制与机械装备设计与优化。
团队现有教师13人,其中教授2人,副教授6人,湖北省突出贡献中青年专家1人,楚天学子1人。团队建有湖北省校企共建激光加工工程技术研究中心、武汉市轻工装备工程技术研究中心、湖北省软磁材料及新型电感企校联合创新中心、湖北省武汉华俄激光工程有限公司研究生工作站等平台;在读研究生50余名。
近五年,研究团队共承担国家及省部级纵、横向课题40余项,到账经费1300余万元,其中包括国家自然科学基金5项、国防科工局项目1项、国家重点研发计划子课题1项、湖北省重点研发计划1项及其他省级课题10余项;团队发表高水平论文50余篇,研究成果荣获湖北省科技进步二等奖1项,国家教学成果二等奖1项,湖北省教学成果一等奖2项,湖北省教学成果二等奖1项。
成员介绍
负责人:
张道德,教授,博士生导师,yl7703永利官网院长,湖北省有突出贡献中青年专家,湖北省委组织部科技创新团队负责人,武汉市第九批“3551”光谷人才,yl7703永利官网“南湖学者”特聘教授;全国光电测量标准化技术委员会委员,中国工程教育认证协会机械类专业认证专家,湖北省机械工程学会教育工作委员会秘书长,湖北省农业工程学会常务理事等。
主要从事机器人智能控制领域的研究工作。近5年主持国家自然科学基金面上项目1项,国防科工局项目1项,国家重点研发计划子课题1项,湖北省重点研发计划1项及其他省级课题近10项,主持横向项目20余项,项目到账经费1000余万元。发表高水平论文20余篇,研究成果获湖北省科技进步二等奖1项,国家教学成果二等奖1项,湖北省教学成果一等奖2项,湖北省教学成果二等奖1项。
成员:

叶旭辉 讲师/博士 1989年7月 |
杨智勇 讲师/博士 1987年6月 |

张楚鹏 讲师/博士 1988年1月 |

商巍 讲师/博士 1989年6月 |

魏琼 副教授/博士 1980年3月 |

李秀红 副教授/博士 1989年12月 |

张金姣 副教授/硕士 1971年8月 |

李奕 副教授/硕士 1976年8月 |

王君明 副教授/博士 出生年月 |

苏旭武 副教授/博士 出生年月 |

唐文杰 硕士 出生年月 |

胡新宇 教授/博士 1975年8月 |
主要科研成果及项目
| 序号 |
项目名称 |
项目来源 |
负责人 |
到帐金额 |
起止年月 |
| 1 |
非结构化野外环境下履带式机器人自主巡航的自适应调控机制研究 |
国家自然科学基金面上项目 |
张道德 |
58 |
2020 |
| 2 |
基于去偏振光散射的嵌段共聚物/盐混合物同向微区结构与结晶研究 |
国家自然科学基金青年项目 |
李秀红 |
24 |
2020 |
| 3 |
运动模糊家蚕微粒子图像的清晰采集与快速识别方法研究 |
国家自然科学基金面上项目 |
胡新宇 |
60 |
2019 |
| 4 |
基于阻尼/刚度协同优化的气动伺服动态负载模拟系统控制方法研究 |
国家自然科学基金青年项目 |
魏琼 |
26 |
2019 |
| 5 |
柔性输电线缆巡检机器无动力下坡制动与能量回收方法研究 |
国家自然科学基金青年项目 |
杨智勇 |
21 |
2019 |
| 6 |
风光混合动力自主巡航清漂及垂向扰动控藻技术与装置 |
国家重点研发计划子课题 |
张道德 |
37 |
2016 |
| 7 |
未知环境自主协作运输多机器人平台研究 |
湖北省科技厅重点研发计划 |
张道德 |
50 |
2020 |
| 8 |
基于视觉反馈的工业机械手运动控制关键技术研究 |
武汉市科技支撑计划项目 |
张道德 |
15 |
2017 |
| 9 |
SP屏蔽罩表面质量视觉检测系统开发 |
湖北蕊源电子股份有限公司 |
张道德 |
30 |
2020 |
| 10 |
基于视觉定位的三通道自动切换系统 |
中国船舶重工集团公司某研究所 |
张道德 |
24.5 |
2019 |
| 11 |
激光加工装备智能化关键技术研究与开发 |
湖北华俄激光科技有限公司 |
张道德 |
180 |
2018 |
| 12 |
舵机加载台开发 |
中国人民解放军总参谋部某研究所 |
张道德 |
65.2 |
2017 |
科研成果
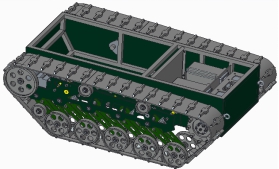
1.非结构化履带机器人系统研制
研究基于多传感信息融合的SLAM方法,采用移动机器人观测数据、自身状态参数及里程计信息计算提议分布,提高机器人环境特征定位准确性和建图实时性。
研究多目标状态约束下的机器人自适应轨迹规划关键性能参数最优匹配方法。结合履带式机器人非结构化工况特征,建立机器人针对不同工况类型的路径规划与跟踪控制系统动力学理论模型,确保机器人运行轨迹、路径跟踪精度及平稳性的最优化。
提出面向多目标的系统动态协调控制方法,提高系统在不同工况下尤其是转向时的鲁棒自适应能力。采用非线性预测控制与动态规划相结合的能量优化管理方法,提高电动履带式机器人的续航能力。
|

|
履带车三维设计图 |
履带车实体图 |
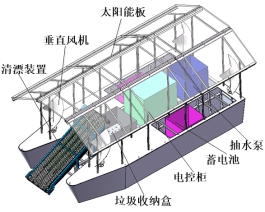
2.风光混合动力自主巡航清漂控藻船
针对目前水库控藻、清漂技术与装备效率低、自动化和智能化程度低的问题,重点突破基于水华区域和漂浮物的主动识别的高效自动控藻技术和清漂技术,试制风光混合动力自主巡航清漂及垂向扰动控藻船,具有明显的环保效益并大量节省人力和燃料消耗成本。研究团队整合了机电装备、控藻技术、能源控制方面的研究力量,能够保障本项目的实施。目前产品在省内河流、湖泊的水面垃圾清理方面得到了一些推广,取得良好的清漂效果,得到当地水利部门的认可,具有良好的社会公益价值和经济价值。
|

|
无人船三维设计图 |
无人船实体照片 |
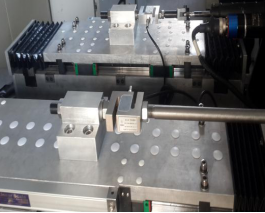
3.舵机伺服加载测试台
电动舵机加载台主要用于完成飞行控制回路的半实物仿真试验,也可用于在舵机试验中加入动态载荷。根据不同飞行剖面所得到的载荷谱可以接口文件的形式来描述、也可以直接与地面飞行仿真计算机实时通讯。已为中国人民解放军总参某所研制开发双通道舵机测试台 (Ⅰ期:1000N)及三通道舵机测试台 (Ⅱ期:2000N)各一台。
|

|
1000N电动舵机加载台 |
2000N电动舵机加载台 |
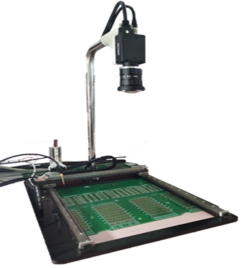
4.基于视觉定位的三通道自动切换系统
本项目采用基于视觉定位的方法实现对大规模数字集成电路测试系统通道接口的全自动切换。以高分辨率相机录入数字通道接口板上的接口,结合视觉算法建立机器视觉系统;通过直线电机及导轨建立高精度的XYZ三轴机械系统。两者通过相应的软件和硬件组织在一起,建立具备全局接口识别、切换路径规划、自动定位对准的通道切换装置加工与制作平台,使柔性高速电信号测量探针能够完全自动对准通道接口板上的接口并进行不同接口之间的切换。
本成果已交付中船重工某研究使用,获得研究所领导的一致好评。主要用于代替人工对PCB板进行智能化高精度测试,也可扩展至芯片瑕疵检测、自动焊接等应用领域,为芯片智能制造提供技术支撑。
|

|
视觉伺服定位平台 |
探针夹持机构 |
